IO模型详解
本文最后更新于:2022年7月3日 下午
I/O模型
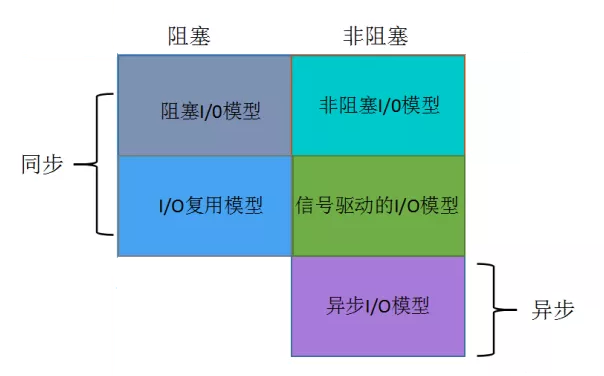
有五种I/O模型:
- 阻塞型I/O:blocking IO
- 非阻塞型I/O:nonblocking IO
- I/O复用:IO multiplexing
- 信号驱动I/O:signal driven IO
- 异步I/O:asynchronous IO
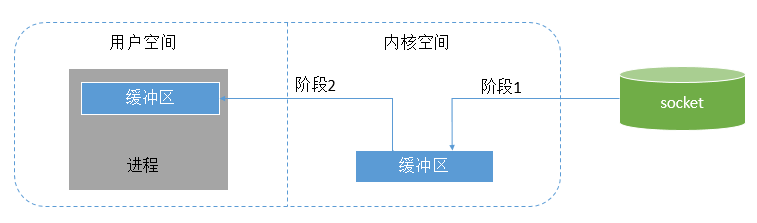
对于一个network IO (以read举例),它会涉及到两个系统对象:一个是调用这个IO的进程,另一个就是系统内核(kernel)。当一个read操作发生时,它会经历两个阶段:
阶段1:等待数据准备 (Waiting for the data to be ready)
阶段2: 将数据从内核拷贝到进程中 (Copying the data from the kernel to the process)
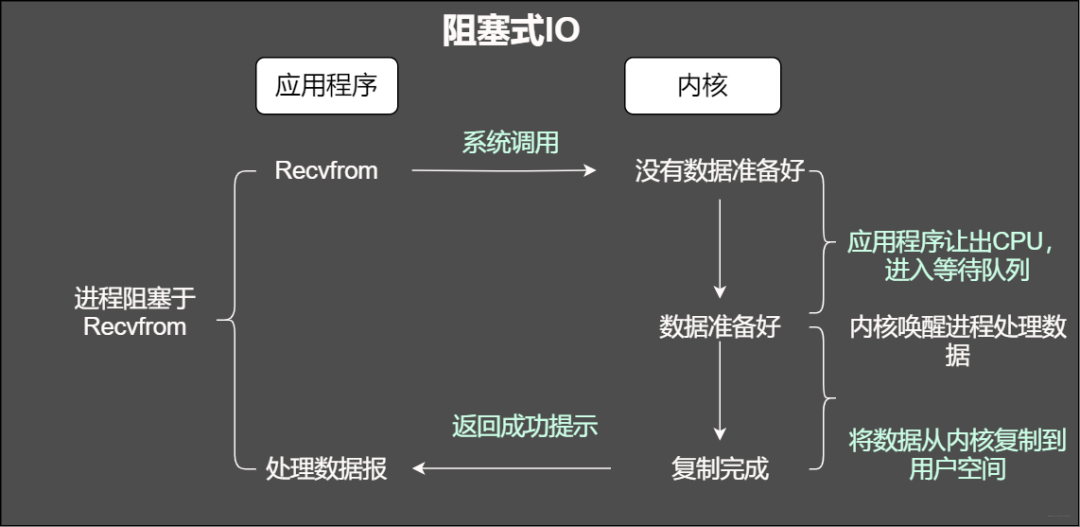
阻塞型I/O
阻塞型IO就是,数据的读入和写出都在一个线程内,需要等待其完成。
当在使用阻塞IO的时候,应用程序会被无情的挂起,等待内核完成操作,因为此时的内核可能将CPU时间切换到了其它需要的进程中,在我们的应用程序看来感觉被卡主(阻塞)了。
采用 BIO 通信模型 的服务端,通常由一个独立的 Acceptor 线程负责监听客户端的连接。我们一般通过在while(true) 循环中服务端会调用 accept() 方法等待接收客户端的连接的方式监听请求,请求一旦接收到一个连接请求,就可以建立通信套接字在这个通信套接字上进行读写操作,此时不能再接收其他客户端连接请求,只能等待同当前连接的客户端的操作执行完成, 不过可以通过多线程来支持多个客户端的连接,如上图所示。
问题:
我们都知道重复的进行创建销毁线程是很耗费系统资源的,并且其线程的利用率也不是很高。
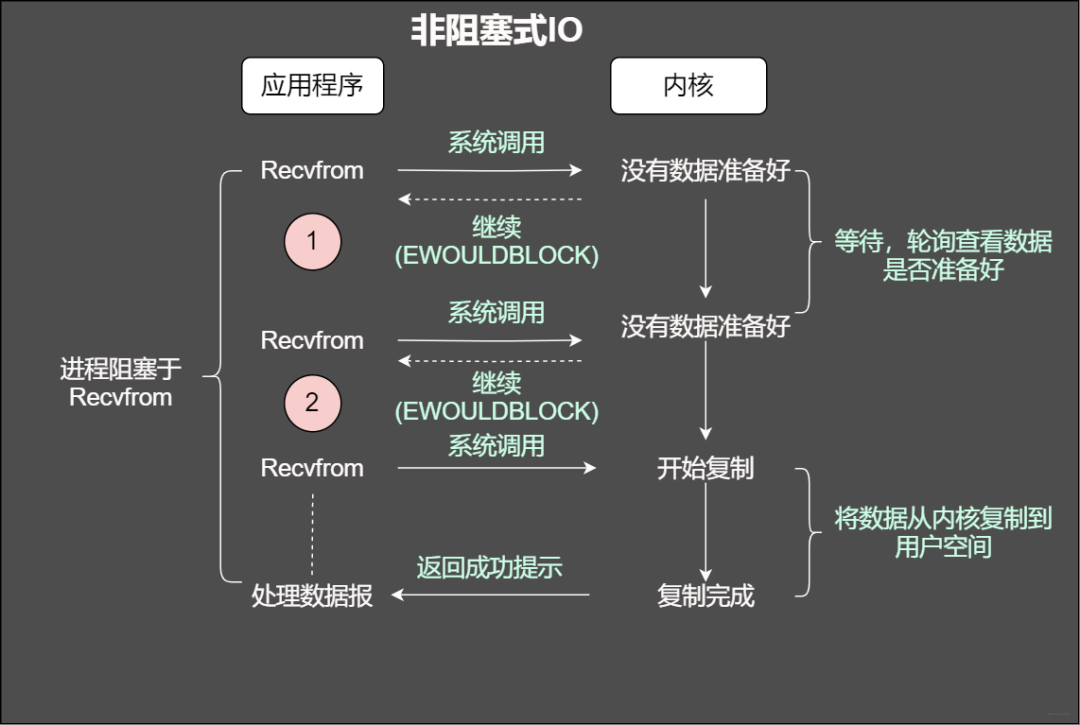
非阻塞型I/O
当使用非阻塞函数的时候,和阻塞IO类比,内核会立即返回,返回后获得足够的CPU时间继续做其它的事情。
当用户进程发出read操作时,如果kernel中的数据还没有准备好,那么它并不会block用户进程,而是立刻返回一个error。 从用户进程角度讲 ,它发起一个read操作后,并不需要等待,而是马上就得到了一个结果。用户进程判断结果是一个error时,它就知道数据还没有准备好,于是它可以再次 发送read操作。一旦kernel中的数据准备好了,并且又再次收到了用户进程的system call,那么它马上就将数据拷贝到了用户内存,然后返回。
所以,用户进程第一个阶段不是阻塞的,需要不断的主动询问kernel数据好了没有;第二个阶段依然总是阻塞的。
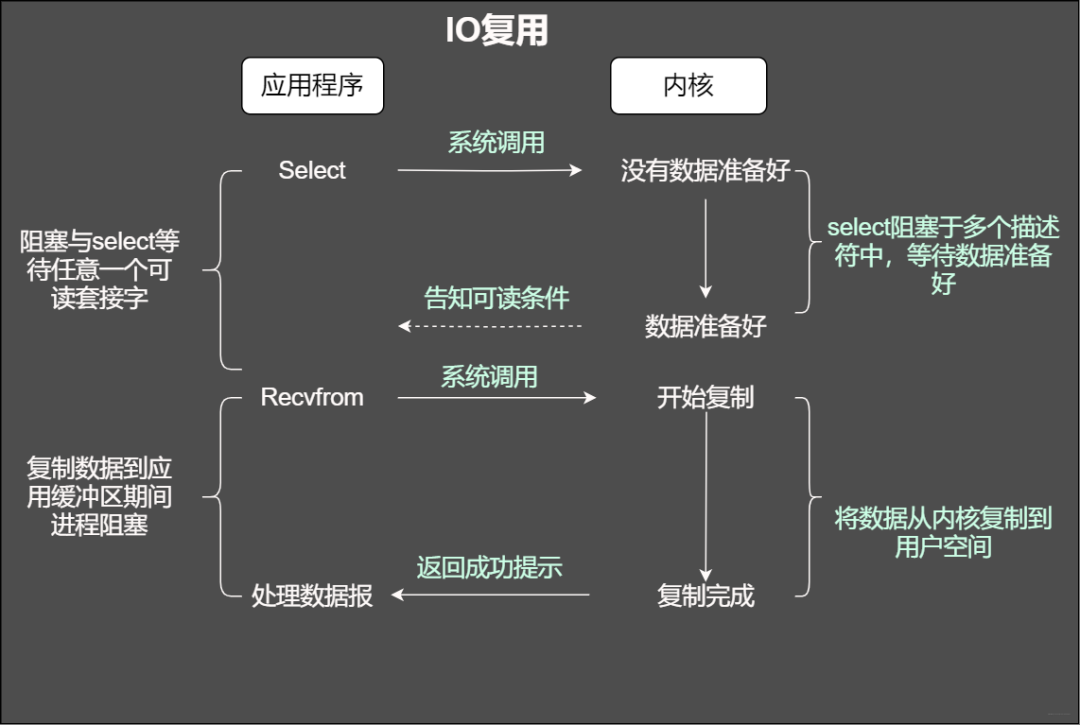
I/O复用
IO复用(IO multiplexing),也称事件驱动IO(event-driven IO),就是在单个线程里同时监控多个套接字,通过 select 或 poll 轮询所负责的所有socket,当某个socket有数据到达了,就通知用户进程。
IO复用同非阻塞IO本质一样,不过利用了新的select系统调用,由内核来负责本来是请求进程该做的轮询操作。看似比非阻塞IO还多了一个系统调用开销,不过因为可以支持多路IO,才算提高了效率。
I/O复用的特点是进行了两次系统调用,进程先是阻塞在 select/poll 上,再是阻塞在读操作的第二个阶段上。
select的缺点
- select返回的是含有整个句柄的数组,应用程序需要遍历整个数组才能发现哪些句柄发生了事件
- select的触发方式是水平触发,应用程序如果没有完成对一个已经就绪的文件描述符进行IO操作,那么之后每次select调用还是会将这些文件描述符通知进程
- 内核 / 用户空间内存拷贝问题,select每次都会改变内核中的句柄数据结构集,因而每次select调用时都需要从用户空间向内核空间复制所有的句柄数据结构,产生巨大的开销
- 单个进程能够监视的文件描述符的数量存在最大限制,通常是1024,当然可以更改数量
epoll实现
epoll在内核中会维护一个红黑树和一个双向链表,红黑树存放通过epoll_ctl方法向epoll对象中添加进来的事件,所以不需要每次调用epoll_wait都全量复制所有的事件结构。双向链表存放就绪的事件,所有添加到epoll中的事件都会与设备(网卡)驱动程序建立回调关系,也就是说,当相应的事件发生时会调用这个回调方法,这个回调方法在内核中叫ep_poll_callback,它会将发生的事件添加到rdlist双链表中。调用epoll_wait就会直接返回链表中的就绪事件,效率高。
缺点:
我们现在可以使用select/poll等系统调用进行事件的检测,但是select会返回所有建立连接的文件描述符,我们需要一个一个去遍历文件描述符,才能知道哪些数据准备好了,然后才能进行后续的操作,但是如果有10K个连接过来,然后我们调用一次select 或者poll的函数调用,然后去遍历所有的文件描述符,结果只有两个客户端的数据准备好了,那么我们剩下的9998次都是在空转,消耗了很多的系统资源。
信号驱动I/O
信号驱动IO与BIO和NIO最大的区别就在于,在IO执行的数据准备阶段,不会阻塞用户进程。
如下图所示:当用户进程需要等待数据的时候,会向内核发送一个信号,告诉内核我要什么数据,然后用户进程就继续做别的事情去了,而当内核中的数据准备好之后,内核立马发给用户进程一个信号,说”数据准备好了,快来查收“,用户进程收到信号之后,立马调用recvfrom,去查收数据。

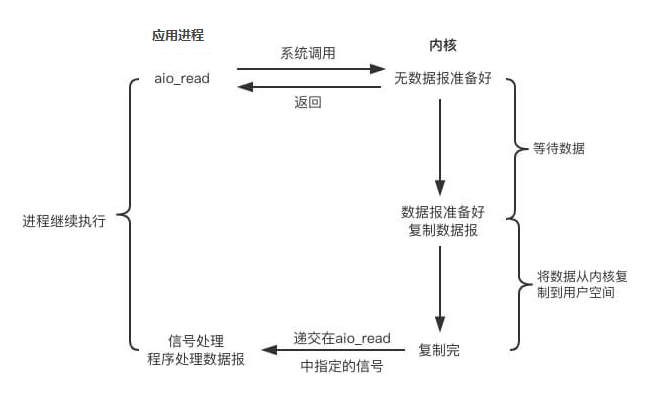
异步I/O
异步IO真正实现了IO全流程的非阻塞。用户进程发出系统调用后立即返回,内核等待数据准备完成,然后将数据拷贝到用户进程缓冲区,然后发送信号告诉用户进程IO操作执行完毕(与SIGIO相比,一个是发送信号告诉用户进程数据准备完毕,一个是IO执行完毕)。其流程如下: